Notice that the figure used to
construct P1/2 showed that H(P0 P1,
P¥ P1/2).
Notice that the construction on the
affine line of the point P2 from
P0,P1, and P¥ looks
the same.
Notice that the figure used to construct P2 shows that H(P1 P¥,
P0 P2).
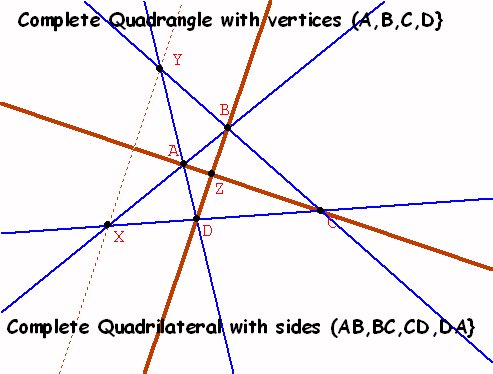
In general, following this construction of P2, it is possible
to construct a fourth point, D, on a line given A,B and C already on
the
line so that H(AB,CD). We can use the construction of P2 to show
how
to construct the point D in general. This will be the key to giving a
correspondence
between points on a projective line and the real numbers with ¥
as a single additional "number" added to extend the set of numbers.
One key issue then is:
Is the point constructed from the
points A,
B and C uniquely determined by the fact that it is in the harmonic
relation
with A, B, and C? That is, if A,B, and C are three points
on a line and D and D* are points where H(AB,CD) and H(AB,CD*), then
must
D=D*?
This is the question of the uniqueness of the point D. We can prove
that in fact the point D is uniquely determined.
The
proof follows the argument of Meserve and Izzo.
It used Desargues' theorem several
times.
Discussion of the dual concept
of a harmonic relation between
four lines passing through a single point.
Theorem: If A,B,C, and D are on a line l
with H(A,B,C,D)
and O is a point making a section with these four points, consisting of
the four lines a,b,c and d, then H(a,b,c,d).
Proof: see M&I Theorem 5.4.
Corollary: (By Duality) If a,b,c,
and d
are on a point O with H(a,b,c,d) and l is
a
line making a section with these four lines, consisting of the four
points
A,B,C and D, then H(A,B,C,D).
Application:
We can think of a perspectivity between points ABCD on line l
and A'B'C'D' on the line l' with respect to the point O
as
being a section of the points ABCD by the point O followed by a section
by the line l' of the lines a,b,c, and d on
the point
O.
Applying the previous theorem and its corollary we see that: If
H(AB,CD) then H(ab,cd) and thus H(A'B',C'D').
Note: This application shows
that if four harmonically related points
on a line are perspectively related to four points on a second line,
then
the second set of four points is also harmonically related. Furthemore,
this result can be extended easily to points that are projectively
related.
Thus the transformations of projectivity in projective
geometry
preserves the harmonic relationship between four points.
[This last note is comparable
to the fact that in Euclidean geometry,
isometries preserve length, and in affine geometry that similarities
preserve
proportions.]
Harmonic Conjugate as a
Transformation: Given A,B, and C points
on a projective line, we have shown that there is a unique point D so
that
H(AB,CD). D is called the harmonic conjugate of C with respect to AB.
In many ways this gives a
transformation of the point on the line to
other points that is similar in its nature to reflections and
inversions.
Notice that on a projective (affine) line two point will cut the line
into
two disjoint pieces, as does a single point for reflection and the
points
PR and P-R for inversion, where the
transformation
maps points in one set into the other while leaving the "boundary
points"
fixed.
With the existence and
uniqueness of the point D established, we can
now consider some examples illustrating how to establish a
coordinate
system for a projective line by choosing three distinct points to be
P0,
P1, and P¥.
We can construct P2, P-1, P1/2, (in two different ways).
Exercise: Construction P3 and P1/3.
Show that with the choice of three points on a projective line
we can construct points using harmonics to correspond to all real
numbers
(as in our informal treatment of the affine line).
5-4
Conics revisited: Pascal and Brianchon Theorems:
Point and line conics.
Consider lines connecting corresponding points in a
pencil of points on a line related by a projectivity (not a
perspectivity) and noticed that the envelope of these lines seemed to
be a conic, a line conic. Notice briefly the dual figure which
would
form a more traditional point conic. [Also notice how line
figures
might be related to solving differential equations e.g. dy/dx=2x-1 with
y(0)=3 has a solution curve determined by the tangent lines determined
by the derivative: y=x^2-x+3 which is a parabola.]
Watch video on conics. Projective
generation of conics HSU VIDEO2574
5-6
Proof of Brianchon's Theorem.
Duality for Pascal's Theorem.
Use of Pascal's Theorem to construct a conic from 5 points.
A brief excursion back to the Inversion
Transformation.
Projective
transformations of the plane and computers graphics.
The complex numbers, C,
and the geometry
of CP(1).
The ordinary points on this "line" can be visualized as
a plane or all the points of a sphere except one- which corresponds to
the north pole or the point at infinity. [Compare this to the
visualization
of RP(1) as a circle.]
Algebraic projective transformations of CP(1).
This means first examine what it means for these to be affine, and then
the geometry of addition and multiplication of complex numbers.
Addition
of a constant complex number corresponds to a translation.
Multiplication
by a constant corresponded to a dilation using the absolute value of
the
complex number for the factor and a rotation by the angle the
corresponding
vector mad with the positive real axis.
An affine transformation
can preserve the distance between complex numbers if |a|=1
where a is a complex number, so a can be thought of a
point on the unit circle
and multiplication by a corresponds to a rotation. So affine
transformations
of CP(1) are rotations followed by translations of the plane of
complex numbers.
What about inversions... ?
Review of algebraic projective transformations of the real
projective line
RP(1).
RP(1) is characterized using the homogeneous coordinates as a set of
pairs of real numbers <a,b>, not both zero, with
<a,b>=<c,d> in
the case there is a nonzero real number t so that c=ta and d=td.
The transformations correspond to 2x2 matrices with non-zero
determinant.
These form a group under composition (matrix multiplication) and we
have
looked at many examples to see how a matrix transforms points on the
projective
line with coordinates to other points on the projective line.
We will see how this transformation is
completely determined by the
correspondence of three distinct pairs of points. In some cases the
transformation
transforms an ordinary point to an ordinary point, the ideal point to
an
ordinary point and an ordinary point to the ideal point, and in some
cases
the transformation will transform the ideal point to the ideal point.
A transformation that transforms the ideal
point to the ideal point
is called an affine transformation. The composition of two affine
transformations
is an affine transformation. The inverse of an affine transformation is
an affine transformation and clearly the identity transformation is an
affine transformation, so the affine transformations are also a group
under
the operation of composition (matrix multiplication).
Projective transformations of RP(2) with
examples of transformations
previously discussed in the course.
Using homogeneous coordinates of points in the affine
plane, we consider
these as points in RP(2). Consider the isometries of translation,
rotation,
and reflection of the plane, extended to the affine plane and thus to
RP(2).
Translation by <a,b>:
Rotation at (0,0) = <0,0,1>
Reflection about the X- axis:
Reflection about the line Y=X:
Central Similarities at (0,0) by a factor of M.
Reconstruction of a point on a conic from
Pascal's Theorem.
The
following materials are
from previous course notes and have not been incorporated into the
current
course notes.
Consider lines connecting
corresponding points in a pencil
of points on a line related by a projectivity (not a perspectivity) and
noticed that the envelope of these lines seemed to be a conic, a line
conic. Notice briefly the dual figure which would form a more
traditional point conic. [Also notice how line figures might be
related
to solving differential equations e.g. dy/dx=2x-1 with y(0)=3 has a
solution
curve determined by the tangent lines determined by the derivative:
y=x^2-x+3
which is a parabola.]
In discussing the issue of whether the 5th
axiom could be proven
from the other four axioms, we looked at an example of another axiom
system,
with an axiom N (any pair of lines having at one point in
common)
and an axiom P (given a line l and a point P not on that line
there
is a line m where P is on m and m and l have no common points) which is
a version of the parallel postulate (Playfair's - not Euclid's). We
gave
examples showing that the four axioms and P were possible as well as
the
four axioms and N were possible. This showed that one can not prove
axiom
P or N from the other four axioms since P and N are contradictory.
By a similar analysis of the axioms for the
seven point geometry
we showed that it not possible prove the 5th postulate from the other
four.
The analysis examines the example of the seven point geometry and
notices
that by including an 8th and 9th point the resulting geometry would
satisfy
the other 4 axioms.
The model we have for affine geometry still
satisfies the parallel
postulate, since the ideal (infinite) points of affine geometry are not
considered as ordinary points of the geometry. However, be removing
this
distinction between ordinary and ideal points and considering the
geometry
that results we obtain a geometry in which there are no parallel lines.
(A projective plane.) This will be a major focus of discussion for the
remainder of the term- especially using the homogeneous coordinates to
consider points in this geometry from an analytic/algebraic approach.
Initial discussion considered the problems of perception
and how the
position of an object in a picture can affect our judgment on its
relative
size. Turning directly to the question of perspective in drawing we
looked
at how an artist tries to capture the visual reality of perception by
drawing
figures larger when they are closer to the eye of the beholder. We
looked
at some Durer drawings showing some mechanical ways to draw accurate
perspective
figures.
An examination of the problems of
transferring an spatial image of
a plane to a second plane using the idea of lines of sight we arrived
at
an understanding of how points in the plane would correspond to lines
through
a point (the eye).
In discussing the 7 point geometry we
visualized it using vertices
of a cube (besides (0,0,0)) with their ordinary coordinates in standard
3 dimensional coordinate geometry and identified the 7 points . This
allowed
us to identify "lines" using the homogeneous coordinate concepts and
their
relation to planes in three dimension through (0,0,0). We identified
all
but one of the lines easily- the last plane has ordinary equation X + Y
+ Z = 2... but in this arithmetic for {0,1} we have 1+1=0, so 2=0 and
the
vertices of that satisfy this equation in ordinary coordinates
{(1,1,0),
(1,0,1),(0,1,1)} form a line as well.
We then discussed using {0,1,2} for
homogeneous coordinates connected
to the arithmetic given by the tables
| + |
0 |
1 |
2 |
|
* |
0 |
1 |
2 |
| 0 |
0 |
1 |
2 |
|
0 |
0 |
0 |
0 |
| 1 |
1 |
2 |
0 |
|
1 |
0 |
1 |
2 |
| 2 |
2 |
0 |
1 |
|
2 |
0 |
2 |
1 |
The homogeneous coordinates for this set
identify ordered triples, for
example: <1,0,1>=<2,0,2> and
<1,0,2>=<2,0,1>. There are
27 possible ordered triples, and thus 26 when we exclude (0,0,0), and
these
are each paired by the factor 2 with another triple, so there will be
exactly
13 points ( and by the comparable work with lines) and 13 lines in this
geometry.
.... some details still to be reported.
We watched the film on central perspectivities
that discussed
perspectivities and projectivities in the plane. Any perspectivity
between
a pencil of points on one line and that one another line can be thought
of as a transformation. This transformation is completely determined by
the relation of two pairs of distinct points on two lines. For a
projectivity
(the composition of a finite number of perspectivities) the result is
that
a projectivity is completely determined by the correspondence of three
points. This result is called the fundamental theorem of projective
geometry and is taken as an axiom by M&I.
[Moved from earlier: The lab time was spent
working on sketches showing
ways to understand that result of the CAROMS film about the inscribed
triangles
of minimum perimeter.In Lab: Discuss some visual features such as trace
and animation and start to look at the use of coordinates. We'll do
more
with coordinates, along with the use of traces and locus to see some
aspects
of coordinate geometry next week.]
We also watched the film on projective
generation of conics which
introduced Pascal's theorem and its converse about hexagons inscribed
in
a conic and showed how to use this result to construct a conic curve
passing
through any 5 points. This work was also related to projectivities
between
pencils of lines. We will be considering this further in the course.
After
a short break we continued using metric ideas to construct an
ellipse
as a locus on sketchpad and discussed how to do a parabola as well. By
next Thursday students should construct examples of the three conics on
sketchpad using metric ideas.
Okay... just a quick recall of some of what we covered:
-
Now that we've established how to connect homogeneous
coordinates to
a projective line using harmonics we continued by looking at some more
algebraic projective lines- with coefficients of Z2,
Z3,
and
Z5, we saw that these projective lines would have 3,4,
and
6 points respectively, corresponding to the 2,3,and 5 ordinary points
and
one ideal point. This lead to
-
A discussion of using the complex numbers, C,
and the geometry
of CP(1). The ordinary points on this "line" can be visualized
as
a plane or all the points of a sphere except one- which corresponds to
the north pole or the point at infinity. [This was compared to the
visualization
of RP(1) as a circle.]
-
The discussion turned to algebraic projective
transformations of RP(1).
When these leave the ideal point fixed they are called affine
transformations
and form a group under composition. We showed that an affine
transformation
has a matrix of the form
and therefore T(Px)=Pax+b. Thus an affine transformation
of the projective
line is a dilation/reflection followed by a translation.
- We looked at the idea of establishing the idea of a
distance between
ordinary points using absolute value-
d( <a,b>,<c,d>) = |a/b -
c/d|. We showed
this is well defined and then discussed what the isometries for this
distance
would be. After some analysis we saw that this would mean that in the
matrix
of an isometry |a|=1, so a=1 or a=-1. I.e, the matrix is
or that T(Px)=P+/-x+b. Thus an isometry of RP(1) is a
reflection followed
by a translation.
- We also looked further at Pascal's theorem and its
planar dual Brianchon's
theorem. Next class we'll prove Brianchon's theorem using an elliptic
hyperbaloid.
Today we did more on algebraic projective
transformations of CP(1).
This meant first examining what it meant for these to be affine, and
then
the geometry of addition and multiplication of complex numbers.
Addition
of a constant complex number corresponded to a translation.
Multiplication
by a constant corresponded to a dilation using the absolute value of
the
complex number for the factor and a rotation by the angle the
corresponding
vector mad with the positive real axis. We also saw how affine
transformations
could preserve the distance between complex numbers if |a|=1
where
a is a complex number, so a can be thought of a point on the unit
circle
and multiplication by a corresponds to a rotation. So affine
transformations
of CP(1) are rotations followed by translations of the plane of
complex numbers. Notice these are all orientation preserving
transformations.
so any reflection of the plane is not an isometry in this geometry. We
looked briefly at another transformation that was a reflection, namely
complex conjugacy, T(a+bi)=a-bi. This is not an isometry in this
geometry
because it is orientation reversing.
We spent the remainder of the lecture time
going over the proof of
Brianchon's Theorem using the proof of Hilbert and Cohn-Vossen based on
hexagons lying on the surface of an elliptic hyperbaloid (which is a
ruled
surface).