Martin Flashman
Department of Mathematics
Humboldt State University
Mathematics Beyond Good and Evil:

in Geometry, Algebra, and Calculus!
Work in Progress
Thursday, November 21
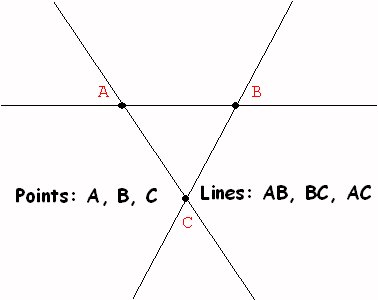 3 points - 3 lines. |
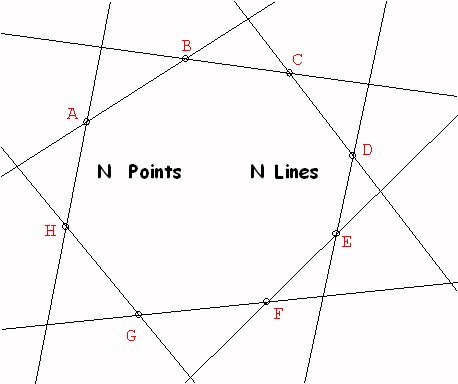 N points - N lines. |
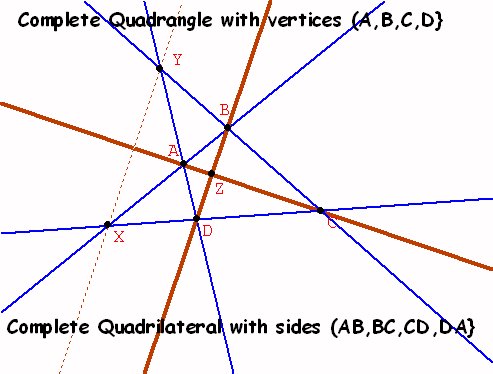 4 points {A,B,C,D} determine 6 lines {AB,AC,AD, BC, BD, CD} and three additional points {X,Y,Z}. |
The Complete Quadilateral: 4 lines {AB, BC, CD,AD}determine 6 points {A,B, C, D, X,Y} with three additional lines{AC, BD, XY} . |
|
|
|
|
from a point |
from a line |
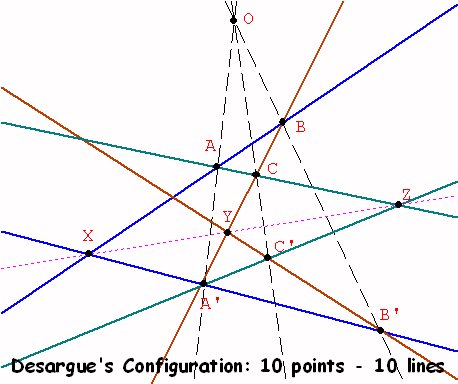
Desargue's Spatial Configuration
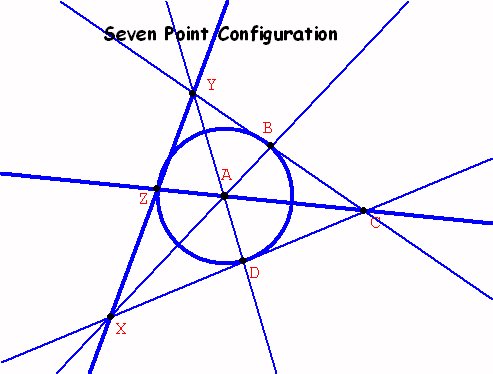
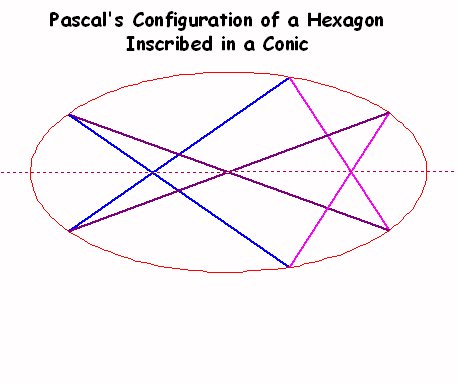 Pascal: 9 points - 7 lines A Point Conic- The conic is described by a set of points |
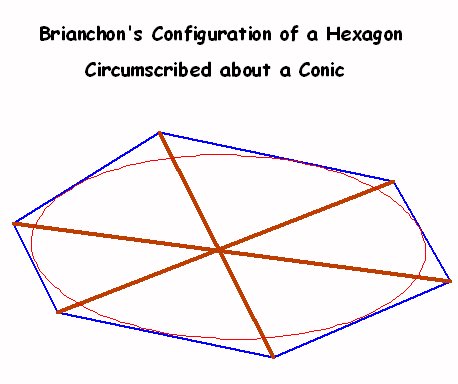 Brianchon: 9 lines - 7 points A Line Conic-The conic is described by a set of lines |
Between neighboring regions add an edge
crossing the original border connecting the dual vertices.
Every
capital has a highway directly connecting it to
neighboring capital.
Every vertex will be surrounded by a network of dual edges enclosing it in a dual region.
The dual map is made up of the dual
vertices, dual edges , and the resulting dual regions.
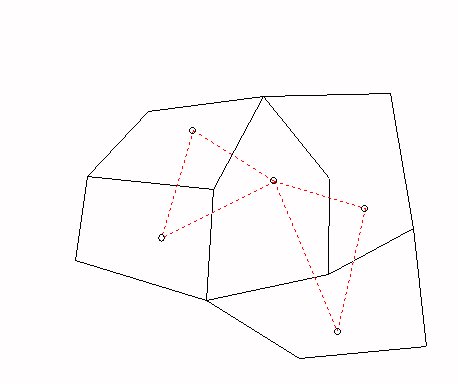 Map in black. Dual Map in red. |
|
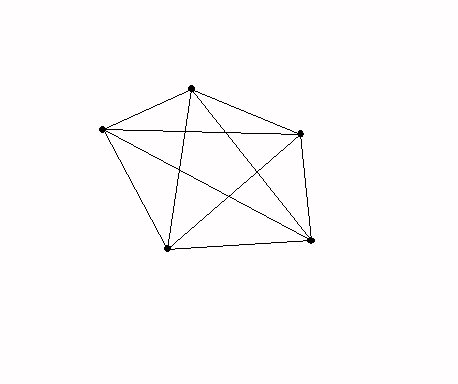
This would have five vertices and each vertex would be connected to every other vertex by an edge ... a complete graph on 5 vertices.
But this graph would have 5 vertices and 10 edges and by Euler's formula* (Not proven here!) that
Thus there must be 7 regions, and
each region would have at least 3 edges.
So if we count the edges (twice - once for
each region on the edge) we would have at least 21
"edges" or at least 11 edges without double counting.
Which is a contradiction, since there
are just 10 edges.
Here is a table showing the five platonic
solids and the duality relation of Vertices, Edges, and
Faces:
|
|
V |
|
|
|
|
8 |
|
|
|
|
6 |
|
|
|
|
12 |
|
|
|
|
20 |
|
|
|
|
|
|
|
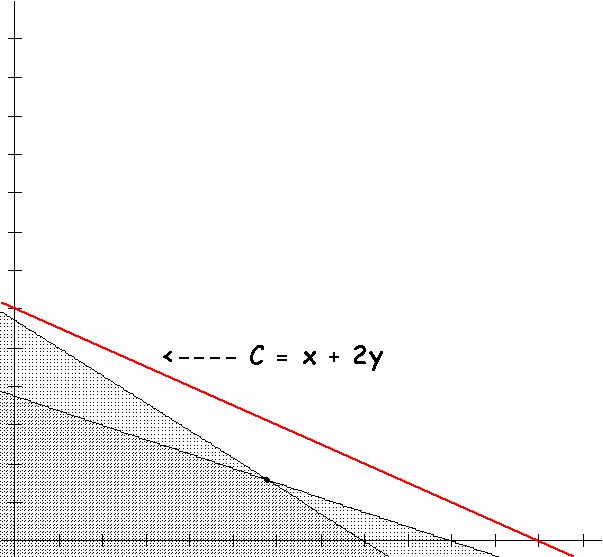
Primal linear program
problem: Min{cx: x >= 0, Ax >= b}.
Example:
| Minimize: |
|
 |
|
|
|
|
|
|
|
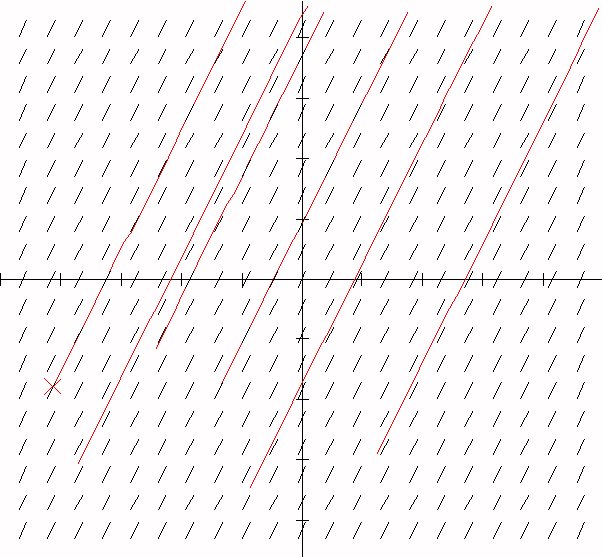
Dual linear program
problem: Max{yb: y >= 0, yA <= c}.
Dual Example:
| Maximize: |
|
 |
|
|
|
|
|
|
|
Gale, Kuhn and Tucker (1951) proved the
fundamental strong duality theorem:
Duality Theorem of
Linear Programming.
For an LP primal-dual
pair, exactly one of the following holds:
1. The
primal has an optimal solution, in which case so must the
dual, and their objective values are equal.
2. The primal is infeasible, in which case the dual is either infeasible or unbounded.
3. The
primal is unbounded, in which case the dual is infeasible.
We'll call [A,B,C] homogeneous coordinates of the P-line.
For example, [1,0,1] are homogeneous
coordinates for the P-line determined by the plane with
equation X + Z = 0.
For example, <1,0,-1> are
homogeneous coordinates for the P-point determined by the
line with equation (X,Y,Z) = (1,0,-1) t.
P: If triangle ABC is Perspective with triangle A'B'C' with center of perpective O then the P-points of intersection of AB, A'B'; AC,A'C'; BC,B'C' all lie on the same P-line.
P':If triangle abc is Perspective with triangle a'b'c' with axis of perpective o then the P-lines joining of a, a'; b,b'; c,c' all pass through on the same P- point. [Also the converse of P!]
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| Point | Interval |
| Static | Dynamic |
| Evaluation
Form ∫ abf (x) dx = F(b) - F(a) |
Derivative Form
F(t) = ∫atf (x) dx ; Then F'(t) = f(t) |
|
|
|
 |