Wednesday April 16
Discuss this week's assignment on coding.
Last Class: Started "topology of networks and surfaces":
Review Topology vocabulary:
"Bounded" In the plane- A line segment is bounded. A line is not bounded. A circle is bounded. A parabola is not bounded. "Bounded" means the object can be visualized in a box.
"closed" A line segment with endpoints is closed. A circle is closed.
A line is closed. A line segment missing one or both endpoints in not closed.
A circle missing one point is not closed.
"open" A line segment missing both endpoints is open. A line is open.
A circle missing one
point is open.
"connected" A line, a line segment, a circle, a circle missing one point,
and a parabola are all connected.
A line segment missing an interior point is not connected.
It has two pieces.
The following two letters are topologically
equivalent.
The following two letters are
topologically equivalent to each other but not to the previous two letters. This can be seen by removing a single point from these letters
which will not disconnect the curves, as it does with the previous letters.
The letter T missing the point
where the top meets the vertical line segment is not connected. It has three
pieces.
The letter Y missing the point where the top meets
the vertical line segment also is not connected. It has three pieces.
T and Y are topologically the same (equivalent)! this can be seen by bending the
tops to the letters up or down and stretching and shrinking the lengths as
well.
Questions: Is a triangle
topologically equivalent to another triangle?
Yes. Stretch the sides and you'll also transform the angles.
Maps
Coordinates for "earth" - the sphere
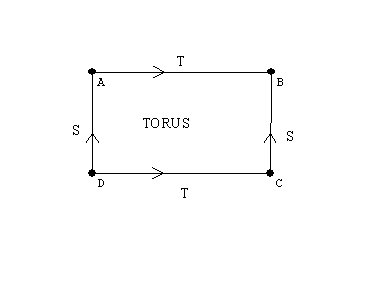
Coordinates for the torus!
Activity for maps on Torus.
Locate P and Q on the map! give their coordinates.
| |
|
Surfaces (CalcPlot3d) Many examples with parametrics.
What is a surface?
Bounded, unbounded:
Closed, open:
With or without boundary:
Orientable or Non-orientable:
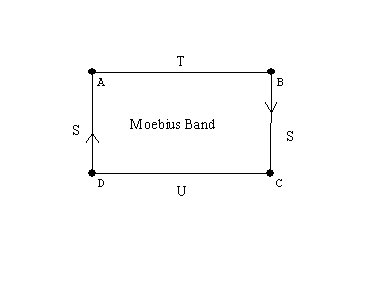
The Moebius band is a non-orientable surface.
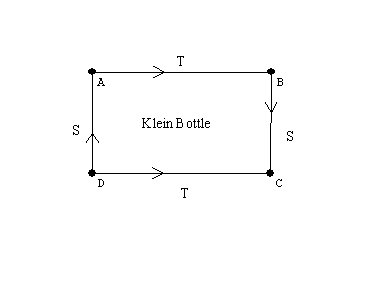
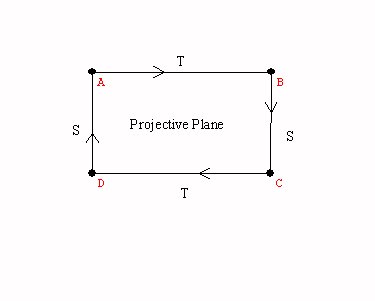
Introduce the Klein Bottle and Projective Plane as examples of non-orientable surfaces.
A surface can be realized (imbedded) in a plane, in 3 space, in 4 space.
A surface can be visualized (immersed) in ...
Review examples: A closed disc, an open disc, a
plane, an annulus- cylinder, a mobius band;
 |
 |
 |
 |
| Mirror image and orientability - see the animated version (73K) | Wind and Mr. Ug | The Möbius band is one-sided - view the animated version (1.3M) |
Experiments with the mobius
band:
Draw a curve along the center of the band- we cover both "sides."
Cut along that curve- the band does not fall apart, but gets twice as
long!
A sphere
A torus

[Activity:Graphs on the torus]
The projective plane
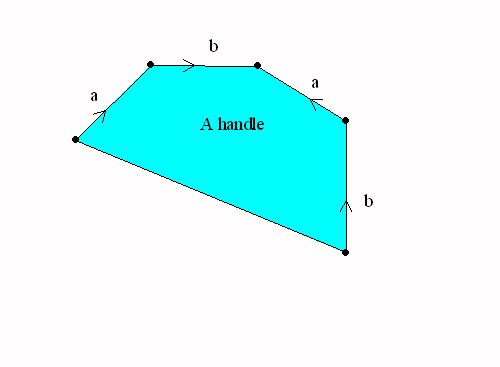
Spheres with handles:

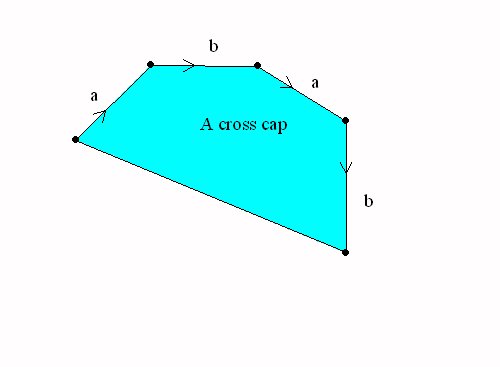
Spheres with cross caps
 .
.Visualizations of surfaces by
flattened - cut apart models.
A cylinder, a mobius band, the torus, the Klein bottle, the projective
plane.
Handles and cross-caps
attached to the sphere.
The Topological Classification of "closed surfaces.
From the Fun Fact files,
hosted by the
Harvey Mudd College Math Department , Unbelievable Unlinking
Imagine that the two objects in Figure 1 are solid (with thickness) and made of very flexible and stretchy rubber. Question: is it possible to deform one object into the other in a continuous motion (without tearing or cutting)? Surprise answer: Yes!! Hint: it is important that the object is solid and has thickness; this transformation cannot be done with a one-dimensional piece of string. It is also not possible to do this with a piece of rope because even though the rope has thickness, it is not flexible or "stretchy" enough. See below for an explanation and animated gif. Or, don't scroll down if you want to think about it a while! The Math Behind the Fact: Graeme McRae has generously contributed the
animated gif in Figure 2, showing another solution to
this problem! (Thank you, Graeme!) |
Visualizations of surfaces by flattened
- cut apart models.
A cylinder, a mobius band, the torus, the Klein bottle, the projective plane.
Closed Surfaces: Handles and cross-caps attached to the sphere.
|
|
| A sphere with a handle = a torus |
A Sphere with a cross cap = the projective plane |
The Topological Classification of "closed surfaces."
Every connected closed and bounded surface is topologically equivalent to a sphere with handles and crosscaps attached.
Topology and measurements:
Counting on a line. Counting
on a curve.
Keep count on the number of vertices and segments for a graph.
Compare:
| Vertices |
Edges |
V-E |
|
| Line
segment I |
2 |
1 |
1 |
| circle O |
1 |
1 |
0 |
| 8 | 1 |
2 |
-1 |
| 9 | 2 |
2 |
0 |
| B | 2 |
3 |
-1 |
Curves will not be topologically equivalent
if the number V-E is not the same.
However, as the table shows, there are
curves that have the same number V-E which are also not equivalent.
These can be distinguished by other criterion, such as connectivity when a point is removed.
The number V-E is a characteristic of the curve that will be the same for
any topologically equivalent curve.
However, this number does not completely classify the curves topologically, since curves can have the same number V-E without being equivalent.
Counting in the plane or Counting on a surface.
Vertices, edges, regions.
| Vertices |
Regions | Edges | |
| Line segment | 2 |
1 |
1 |
| circle | 1 |
2 |
1 |
| 8 | 1 |
3 |
2 |
| 9 | 2 |
2 |
2 |
| B | 2 |
3 |
3 |
|
6 |
8 |
12 |
Counting in the plane or Counting on a sphere.
Euler's Formula for the plane
or the sphere:
Theorem: For any connected graph in the plane,
The number 2 is called the "Euler characteristic
for the plane." ( and the sphere).
Proof: Deconstruct the graph.
First remove edges to "connect regions" until there is only one region.
The relation between V+R and E+ 2 stays the same. (One edge goes with
one region.)
Now remove one vertex and edge to "trim the tree".
Again the relation between
V+R and E+2 stays the same. ( One edge goes with each vertex.)
Finally
we have just one vertex, no edges, and one region.
So the relationship
is that V+R = E + 2!
For any connected graph on the sphere, V+R = E + 2
Proof:
Choose a point P on the sphere not on the
graph.
Place a plane touching the sphere opposite to P.
Then project the
graph onto the plane.
The projected graph will have the same number of vertices,
edges and regions.
The counting in the plane shows that the formula is true
for the projected graph, and thus for the original graph on the sphere!
What about graphs on the Torus?
We have a connected graph on the torus with one vertex, two edges and only
on region. But this information does not match for the euler formula for the
plane or the sphere. SO.. the torus must be topologically different from the
sphere or the plane!
In fact for the torus we see that it is possible for V+R= E or V-E+R=
0
Summary: We have learned about
(and proved) Euler's Formula
for the plane or the sphere: